


Motor DC atau motor DC adalah suatu alat yang mengubah energi listrik menjadi energi kinetik atau gerak (motion). Motor DC ini bisa juga disebut motor DC. Seperti namanya, motor DC memiliki dua terminal dan membutuhkan arus searah (DC) untuk menggerakkannya. Motor DC ini biasa digunakan pada peralatan elektronik dan listrik yang menggunakan daya DC seperti portable vibrator, kipas DC dan bor listrik DC.
Motor DC atau DC Motor ini menghasilkan sejumlah putaran per menit atau biasa dikenal dengan RPM (Revolutions Per Minute) dan dapat berputar searah atau berlawanan arah jarum jam jika elektroda motor DC berlawanan arah jarum jam. Motor DC datang dalam berbagai ukuran dan kecepatan. Kebanyakan motor DC memberikan kecepatan putaran sekitar 3000 rpm sampai 8000 rpm dengan tegangan operasi dari 1,5 V sampai 2V.
Jika tegangan yang diberikan pada tegangan motor DC lebih rendah dari tegangan kerja maka akan memperlambat kecepatan putaran motor DC. Sedangkan tegangan yang lebih tinggi dari tegangan kerja akan membuat motor DC berjalan lebih cepat. Namun, ketika tegangan yang diberikan ke motor DC turun di bawah tegangan operasi yang ditentukan, motor DC tidak dapat berputar atau berhenti. (Motor DC)

Pada motor DC, kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konverter energi baik energi listrik menjadi energi mekanik (motor) maupun sebaliknya dari energi mekanik menjadi energi listrik (generator) berlangsung melalui medium medan magnet. Energi yang akan diubah dari suatu sistem ke sistem yang lain, sementara akan tersimpan pad medium medan magnet untuk kemudian dilepaskan menjadi energi system lainya. Dengan demikian, medan magnet disini selain berfungsi sebagi tempat penyimpanan energi juga sekaligus proses perubahan energi, dimana proses perubahan energi pada motor arus searah dapat digambarkan pada gambar

Dalam aplikasinya seringkali sebuah motor digunakan untuk arah yang searah dengan jarum jam maupun sebaliknya. Untuk mengubah putaran dari sebuah motor dapat dilakukan dengan mengubah arah arus yang mengalir melalui motor tersebut.




Pada modul ini terdapat potensiometer yang dapat digunakan untuk mengatur jangkauan pendeteksian. Modul ini menggunakan komparator IC LM393. Rangkaian komparator pada modul ini menggunakan mode non-inverting di mana ketika tegangan pada pin (+) lebih besar dari pin (-) , maka output akan berayun ke arah V+, tetapi jika tegangan pada pin (+) lebih kecil dari pin (-), maka output akan berayun ke arah V-.

Pada Modul rangkaian komparator ini LED obstacle yang berada di modul FC-51 ini akan padam ketika output berayun ke arah V+ dan LED obstacle yang berada di modul FC-51 ini akan menyala ketika output berayun ke arah V-.
Sensor Ultrasonik
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah gelombang suara dari 40 KHz hingga 400KHz.
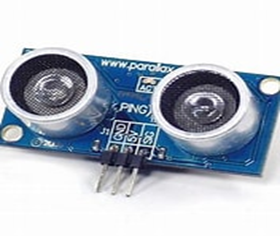
Ultrasonik modul umumnya berbentuk papan elektronik ukuran kecil dengan rangkaian elektronik dan 2 buah transducer. Dari 2 buah transducer ini, salah satu berfungsi sebagai transmitter dan satu lagi menjadi receiver sekaligus. Tersedia pin VCC, TRIG, ECHO dan GND. Prinsip kerja sensor ultrasonik ini dapat dilihat pada gambar berikut :
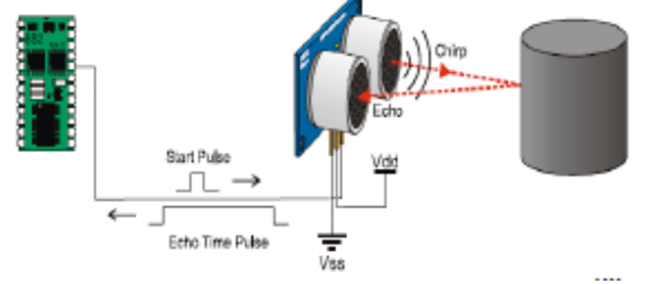


Prinsip kerja sensor ultrasonik yaitu pantulan gelombang suara digunakan untuk mendefinisikan atau jarak suatu objek dengan frekuensi tertentu. Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip kerja pantulan gelombang suara, dimana sensor menghasilkan gelombang suara yang kemudian menangkap kembali dengan perbedaan waktu sebagai dasar pengindra. Perbedaan waktu antara gelombang suara yang dipancarkan dan diterima kembali adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya. Jenis objek yang dapat diindranya adalah zat padat, zat cair dan butiran. Sensor ultrasonik dapat dengan mudah dihubungkan dengan mikrokontroler melalui satu pin I/O.
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
o Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
o Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
o Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
Motor servo

Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 mS pada periode selebar 2 mS maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Motor servo adalah motor yang berputar lambat, dimana biasanya ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi yang kuat karena internal gearnya. Lebih dalam dapat digambarkan bahwa sebuah motor servo memiliki :
(a) 3 jalur kabel : power, ground, dan control
(b) Sinyal control mengendalikan posisi
(c) Operasional dari servo motor dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum.
(d) Konstruksi didalamnya meliputi internalgear, potensiometer, dan feedback control.
Jumper

Kabel jumper adalah kabel elektrik yang memiliki pin konektor di setiap ujungnya dan memungkinkan untuk menghubungkan dua komponen yang melibatkan Arduino tanpa memerlukan solder.
Biasanya kabel jamper digunakan pada breadboard atau alat prototyping lainnya agar lebih mudah untuk mengutak-atik rangkaian.
Konektor yang ada pada ujung kabel terdiri atas dua jenis yaitu konektor jantan (male connector) dan konektor betina (female connector).
Breadboard

Breadboard terdiri dari lubang yang digunakan untuk menempatkan terminal komponen dan kemudian lubang ini dihubungkan satu sama lain menggunakan berbagai kabel/kawat.

Dua baris pertama (atas) dan dua baris terakhir (bawah) papan breadboard digunakan untuk positif (satu baris pertama dan terakhir dua) dan untuk negatif (baris lain dari dua pertama dan terakhir).
Pada gambar breadboar di atas, dua baris pertama (atas) dan terakhir (bawah) papan breadboard terdiri dari 5 lubang di setiap kolom (total 10 kolom) saling terhubung secara horizontal satu sama lain secara internal.
Jika terminal sumber daya terhubung dalam satu lubang satu kolom di baris atas atau bawah (salah satu dari dua baris), maka daya listrik yang sama dapat diambil dari lima lubang berturut-turut di kolom yang sama.
Arduino Uno

Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Arduino uno memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
Setiap 14 pin digital pada arduino uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(), digitalwrite(), dan digitalRead(). Fungsi fungsi tersebut beroperasi di tegangan 5 volt, Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm.
Input dan Output
Setiap 14 pin digital pada ArduinoUno dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor 20-50 Kohms.
Catu Daya
ArduinoUno dapat beroperasi melalui koneksi USB atau power supply. Dalam penggunaan power supply dapat menggunakan adaptor DC atau baterai. Adaptor dapat dihubungkan dengan jack adaptor pada koneksi port input supply.
Memory
Arduino memiliki 32 KB flash memory4 untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader.Arduino memiliki 2 KB untuk SRAM dan 1 KB untuk EEPROM.
Perangkat Lunak (Arduino Software)
Lingkungan open-source Arduino atau Arduino IDE5 memudahkan untuk menulis kode dengan meng-upload ke I/O board. Ini berjalan pada Windows, Mac OS X, dan Linux. Berdasarkan pengolahan, avr-gcc, dan perangkat lunak open-source lainnya.
Pemograman
Arduino Uno dapat diprogram dengan perangkat lunak Arduino. Pilih ArduinoUno dari Tool lalu sesuaikan denganMicrocontroller yang digunakan.
Resetter
Tombol reset Arduino Uno dirancang dengan cara yang memungkinkan untuk mengatur ulang oleh perangkat lunak yang berjalan pada computer yang terhubung.
Arduino IDE
IDE (Ingrated Development Environment) yang diperuntukan untuk membuat perintah atau source code, melakukan pengecekan kesalahan,kompilasi,upload program, dan menguji hasil kerja arduino melalui serial monitor
- RESISTOR
Resistor merupakan komponen elektronika dasar yang digunakan untuk membatasi jumlah arus yang mengalir dalam satu rangkaian.Sesuai dengan namanya, resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Resistor memiliki simbol seperti gambar dibawah ini :

Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :



Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Resistor

| Specifications | |
| Resistance (Ohms) | 10K, 500K |
| Power (Watts) | 0.25W, 1/4W |
| Tolerance | ±5% |
| Packaging | Bulk |
| Composition | Carbon Film |
| Temperature Coefficient | 350ppm/°C |
| Lead Free Status | Lead Free |
| RoHS Status | RoHS Compliant |
Data sheet resistor:


Ie = Ic + Ib
Keterangan :
Ie = Arus Emitter
Ic = Arus Collector
Ib = Arus Basis
Keterangan :
Ie = Arus Emitter
Ic = Arus Collector

- Op-amp inverting




LCD 16x2
LCD (Liquid Crystal Display) merupakan komponen elektronika yang berfungsi untuk menampilkan suatu data dapat berupa karakter, huruf, symbol maupun grafik. Karena ukurannya yang kecil maka LCD banyak dipasangkan dengan Mikrokontroller. LCD tersedia dalam bentuk modul yang mempunyai pin data, control catu daya, dan pengatur kontras.

Keterangan PIN LCD 16x2
i) GND : catu daya 0Vdc
ii) VCC : catu daya positif
iii) Constrate : untuk kontras tulisan pada LCD
iv) RS atau Register Select :
(1) High : untuk mengirim data
(2) Low : untuk mengirim instruksi
v) R/W atau Read/Write
(1) High : mengirim data
(2) Low : mengirim instruksi
(3) Disambungkan dengan LOW untuk pengiriman data ke layar
vi) E (enable) : untuk mengontrol ke LCD ketika bernilai LOW, LCD tidak dapat diakses
vii) D0 – D7 = Data Bus 0 – 7
viii) Backlight + : disambungkan ke VCC untuk menyalakan lampu latar.
ix) Backlight – : disambungkan ke GND untuk menyalakan lampu latar

L293D Motor Driver

Gambar IC L293D
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver motor DC IC l293D adalah sebagai berikut.

Fungsi PIN
(1) Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
(2) Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
(3) Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC
(4) Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
(5) Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Jenis dan Simbol Dioda
Seperti penjelasan diatas, Jenis dioda tergantung dari bahan material yang dipakai saat pembuatannya, dibawah ini adalah contoh gambar dan simbol dari jenis-jenis dioda:
1. Dioda Silicon
Potensiometer

Potensiometer adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang tergolong dalam Kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar dibawah ini menunjukan Struktur Internal Potensiometer beserta bentuk dan Simbolnya.
Pada dasarnya bagian-bagian penting dalam Komponen Potensiometer adalah:
- Penyapu atau disebut juga dengan Wiper
- Element Resistif
- Terminal
Berdasarkan bentuknya, Potensiometer dapat dibagi menjadi 3 macam, yaitu:
· Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya
· Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel Potentiometer.
· Potensiometer Trimmer, yaitu Potensiometer yang bentuknya kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya.
Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer.
Elemen Resistif pada Potensiometer umumnya terbuat dari bahan campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon). Berdasarkan Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2 jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer Logaritmik (Logarithmic Potentiometer).
Dengan kemampuan yang dapat mengubah resistansi atau hambatan, Potensiometer sering digunakan dalam rangkaian atau peralatan Elektronika dengan fungsi-fungsi sebagai berikut: ·
· Sebagai pengatur Volume pada berbagai peralatan Audio/Video seperti Amplifier, Tape Mobil, DVD Player.
· Sebagai Pengatur Tegangan pada Rangkaian Power Supply
· Sebagai Pembagi Tegangan Aplikasi Switch TRIAC
· Digunakan sebagai Joystick pada Tranduser
· Sebagai Pengendali Level Sinyal
Sensor LOADCELL
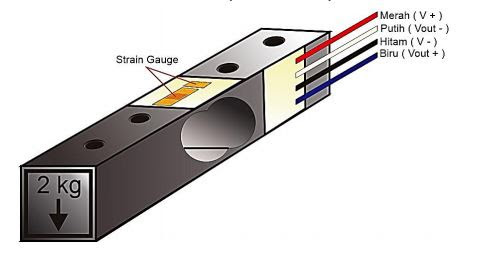
Load cell adalah jenis transduser gaya (sensor gaya). Ini mengubah gaya yang diberikan pada sel beban, seperti tegangan, kompresi, atau tekanan, menjadi sinyal listrik. Kekuatan sinyal berbanding lurus dengan gaya yang diterapkan.
Sel beban pengukur regangan adalah jenis sel beban yang paling umum digunakan dalam aplikasi industri. Tubuh (atau "elemen pegas") dari sel beban industri terdiri dari logam fleksibel minimal di mana pengukur regangan telah diamankan. Saat gaya diterapkan, elemen pegas sedikit berubah bentuk tetapi cukup elastis untuk kembali ke bentuk aslinya.
Saat bentuk elemen pegas berubah, demikian pula bentuk pengukur regangan yang melekat padanya, sehingga meningkatkan atau menurunkan hambatan listriknya. Ketika arus dilewatkan melalui pengukur regangan, variasi resistansi ini akan tercermin dalam keluaran tegangan terukur. Karena perubahan keluaran ini sebanding dengan jumlah berat yang diterapkan, berat benda kemudian dapat ditentukan dari perubahan voltase.

Load cell bekerja berdasarkan regangan dan tekanan dari strain gauge. Ketika beban diterapkan, badan load cell mengalami deformasi elastis yang menyebabkan terjadinya kompresi (compression) dan tekanan (tension) pada strain gauge yang terpasang. Strain gauge yang berada dalam kondisi terkompresi, kawat grid akan mengalami perubahan kondisi menjadi lebih tebal dan lebih pendek (Gambar 11 (a)). Sedangkan strain gauge yang berada dalam tekanan, kawat grid akan lebih tipis dan lebih panjang (Gambar 3.3 (b)). Dari proses kompresi dan tekanan tersebut strain gauge akan menghasilkan perubahan tahanan listrik atau resistansi.

Agar elemen pegas membelok tanpa deformasi permanen, jumlah defleksi harus minimal. Perhitungan berdasarkan perubahan resistansi kecil dari satu pengukur regangan tidak terlalu akurat dan dapat mengalami kesalahan. Untuk mengkompensasi hal ini, dan memungkinkan tingkat akurasi yang sangat tinggi dalam sel beban, beberapa pengukur regangan digunakan. Diatur dalam konfigurasi jembatan Wheatstone (seimbang ketika tidak ada beban diterapkan) perubahan keseluruhan dalam perlawanan di semua 4 pengukur regangan dapat ditentukan dengan menggunakan hukum Ohm dan persamaan di bawah ini.



Video review BLOG dari Saiydul Azmi
Tidak ada komentar:
Posting Komentar